I got my new 3D printer up and running recently. After some tuning, some improving, and some printing of backup parts (an ongoing process, I decided I was confident to move forward.
First a picture of said printer:
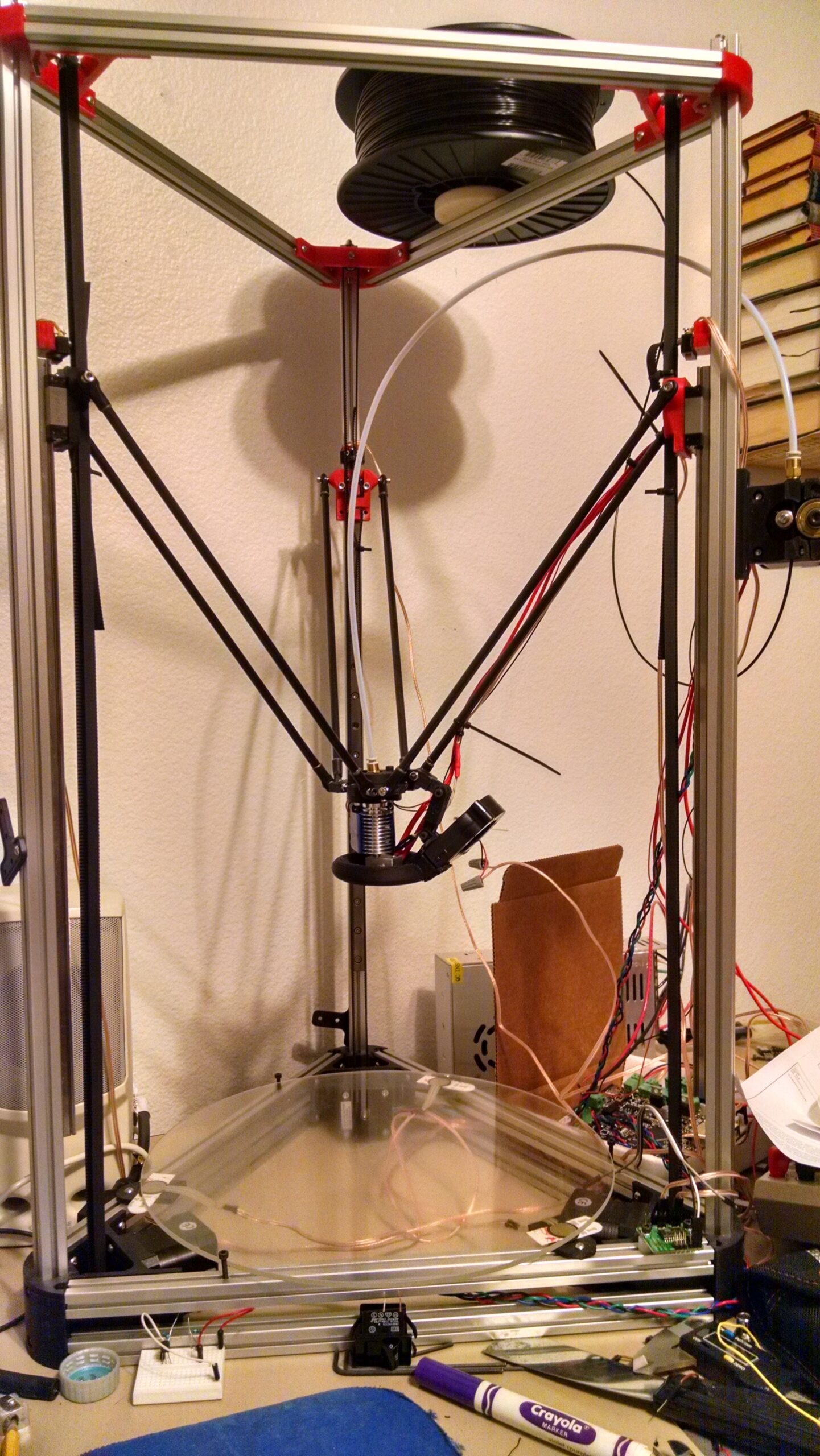
Pretty nice, huh? It’s a large Delta printer called a Kossel. I printed the vast majority of the parts on my Makerbot Cupcake, which just very recently found itself a new home at Ctrl-H, the local Hackerspace.
When I originally got a 3D printer (2010!) my dreams were of building robots. Motors and circuits were one thing but with this I could actually print wheels, frames, grippers, or whatever else I could come up with. Now that my printer is reliable, those dreams can come true! With MakerFaire coming up in a few weeks, I started to think about what I can take and what I can do.
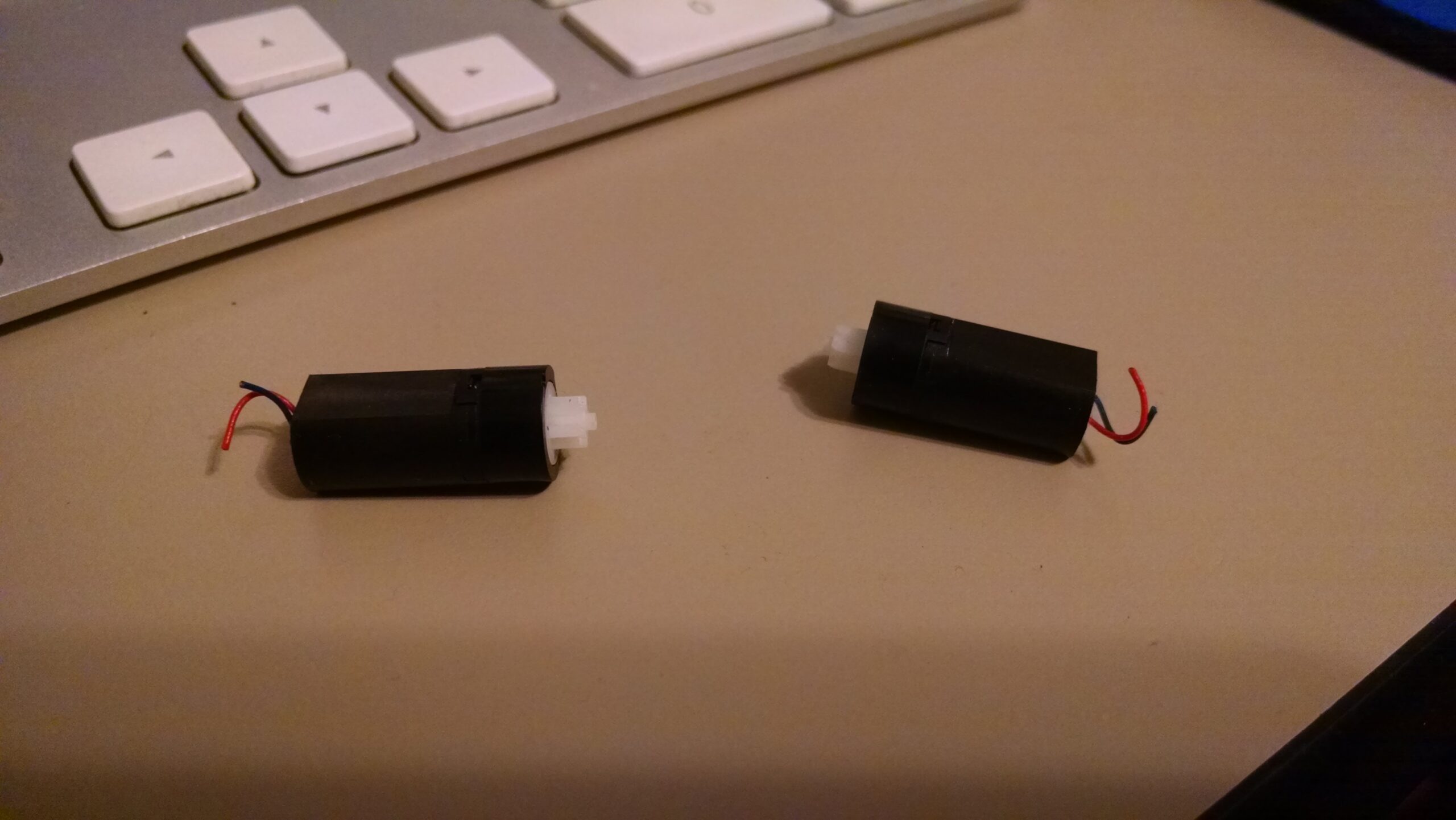
I bought these motors sometime last year. They’re super small, probably for some toy. They have a 10mm diameter, and a planetary gear in the head that transfers the speed into torque. I bought them because I wanted to explore swarm-robotics. I hadn’t really gotten anywhere though, so they lived in a plastic bag, waiting for a better day.
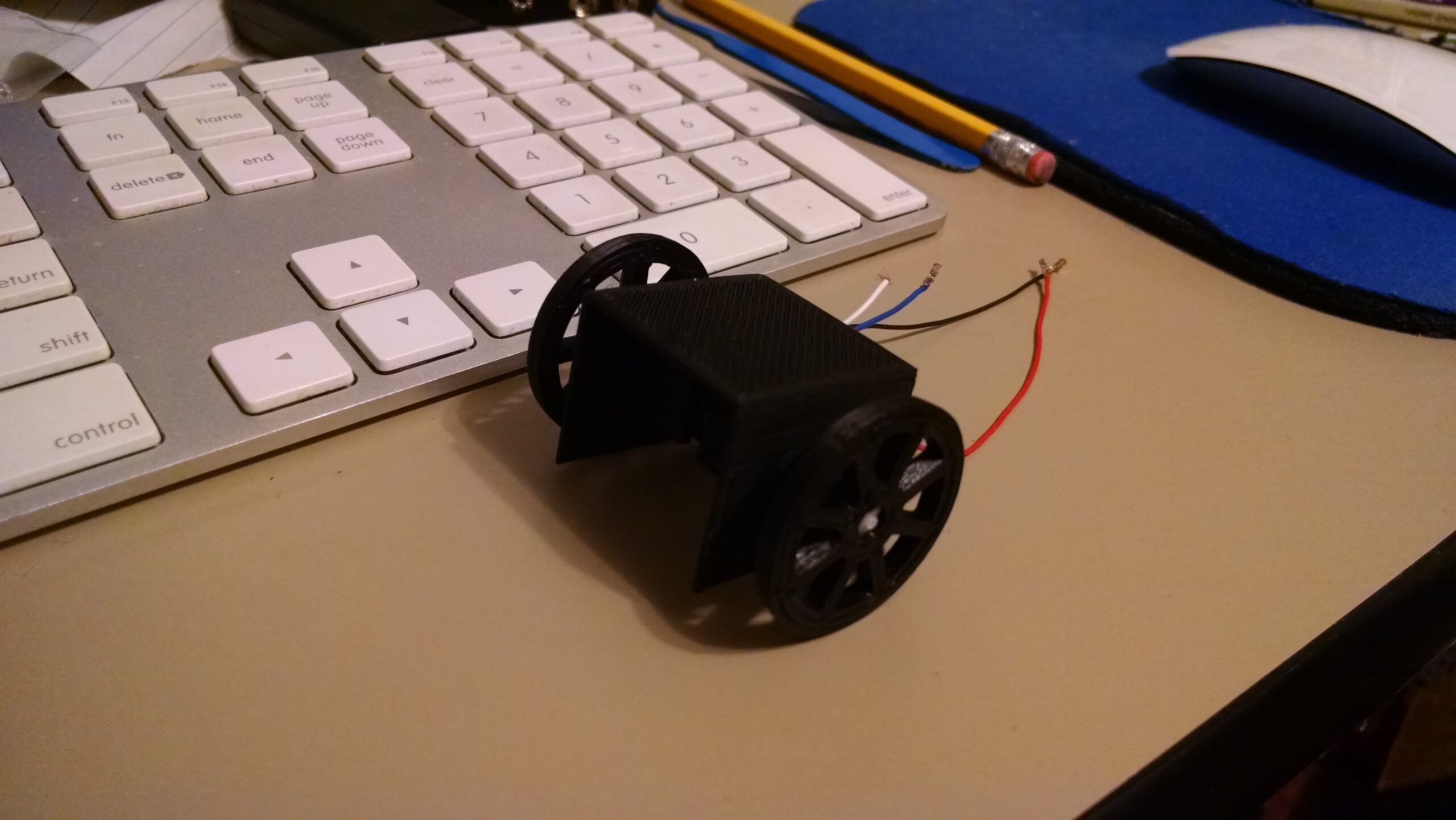
Fishing them out, I worked through a wheel script you can find on Thingiverse. It took some experimentation, but I managed to finally output a wheel that fit the shaft of the motor.

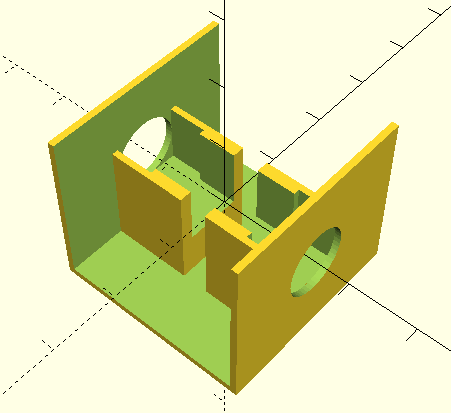
With wheels, I was in a good spot to print something for the motors to sit in. I spent a couple hours (maybe even 3) re-learning OpenSCAD and figure out how to capture the motors reasonably eventually, I came up with this:
I printed it, and looked to see how it’d turned out. To my surprise, I found that it actually made more sense the other direction. The mounting holes and housing is pretty tight, and with the bottom as the top, you actually have a nice platform to place stuff on.
This is the physical object printed out, and placed “Rightside-up” (This one with a flash because the detail’s easier to see.)

And that’s where I am on the project. I’ve hit a little bit of a snag because I don’t know what I’m going to do about electronics. I’ve got plenty of Arduinos, but they’re all much too big, and I need a motor driver on top of that. I came across Monty Goodson’s MEGABitty, which puts an ATMega8 on a surprisingly small space – but the Mega8 is a little less than what I want. Currently I’m looking to see if I can adapt the Arduino Micro into a small form factor with a couple of motor controllers and maybe some simple sensor input.
You could work with something like a Teensy or a Trinket Pro or a Nano. And a motor driver chip isn’t that much. Think about doing it on a solderless breadboard for a base, because you will need sensors and so forth. (Or if you’re serious about swarms, why not one of those little wifi chips on a breakout? They’ve got oodles of ram and processing power)